想要L5级自动驾驶?对,就大众GEN.TRAVEL这样的
视频地址:
想要L5级自动驾驶?对,就大众GEN.TRAVEL这样的
2022年09月29日 17:26
来源:二师兄玩车
[车友头条-车友号-二师兄玩车]  新势力们搅浑汽车市场这潭水,也不全是坏事。
新势力们搅浑汽车市场这潭水,也不全是坏事。
最起码,保守甚至躺平的传统车企们,也知道时不时地展望一下未来,放下身段去斩获一些关注热度了……
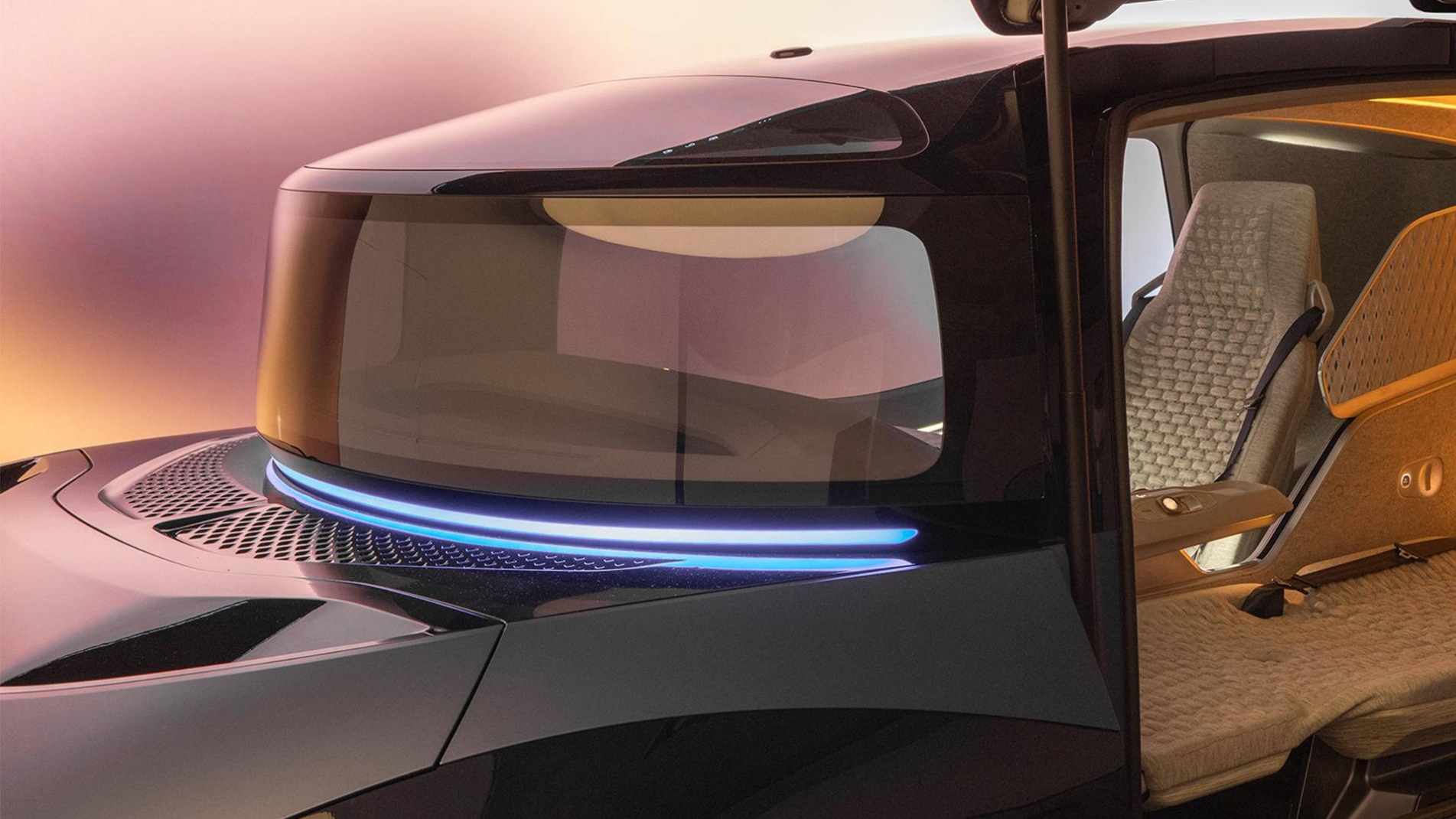
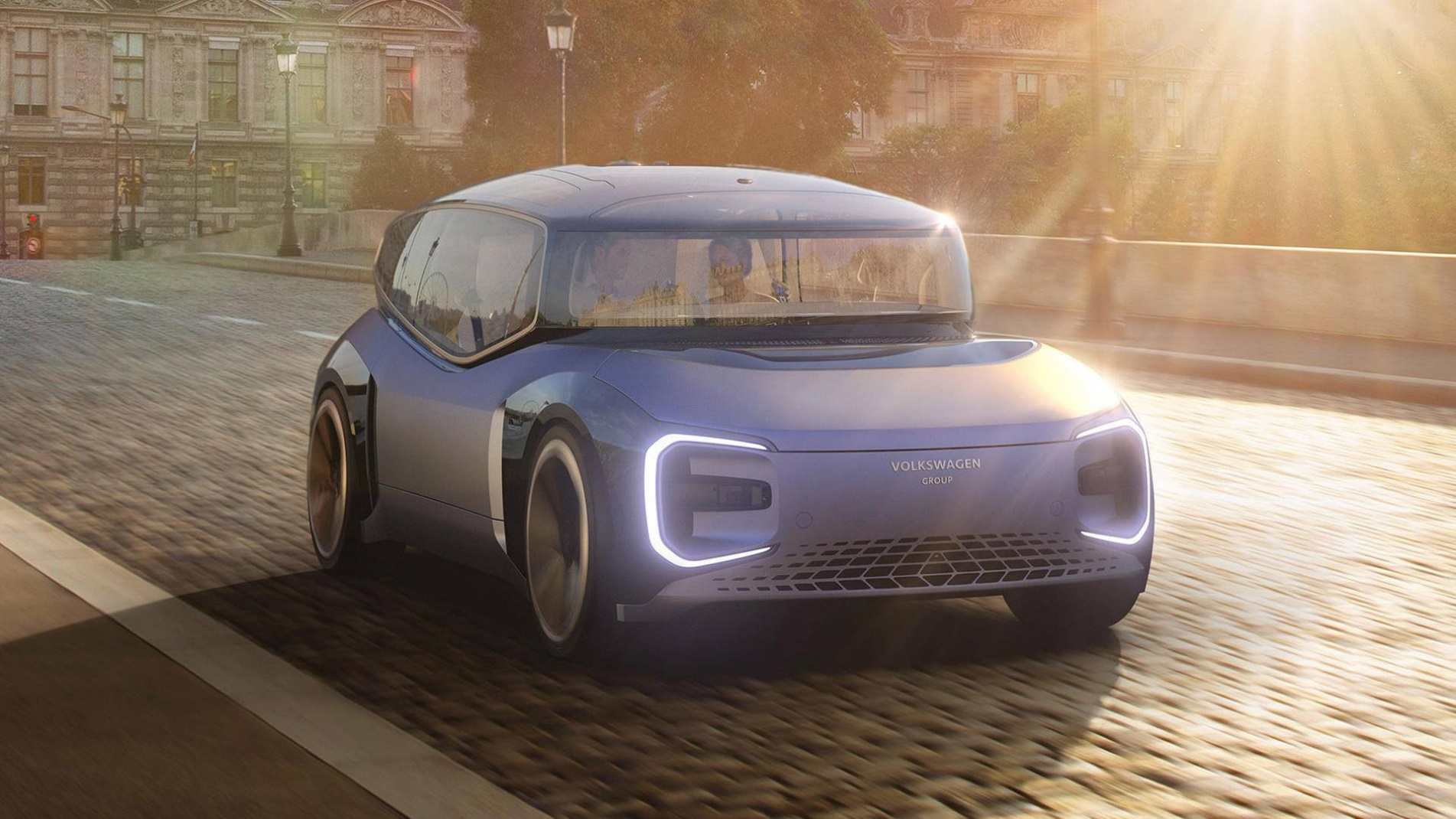 就比如,在智能化技术上已经保守相当一段长时间的大众,近日发布了一组GEN.TRAVEL的官图。
就比如,在智能化技术上已经保守相当一段长时间的大众,近日发布了一组GEN.TRAVEL的官图。
零排放、零压力的出行方式是其主打的展望卖点,L5级别的辅助驾驶和电驱动是技术核心。
那么,大众想象的这种未来产品究竟还离我们多远?
技术上,又需要工程师们做出哪些突破呢?
 感知,是第一道坎
感知,是第一道坎
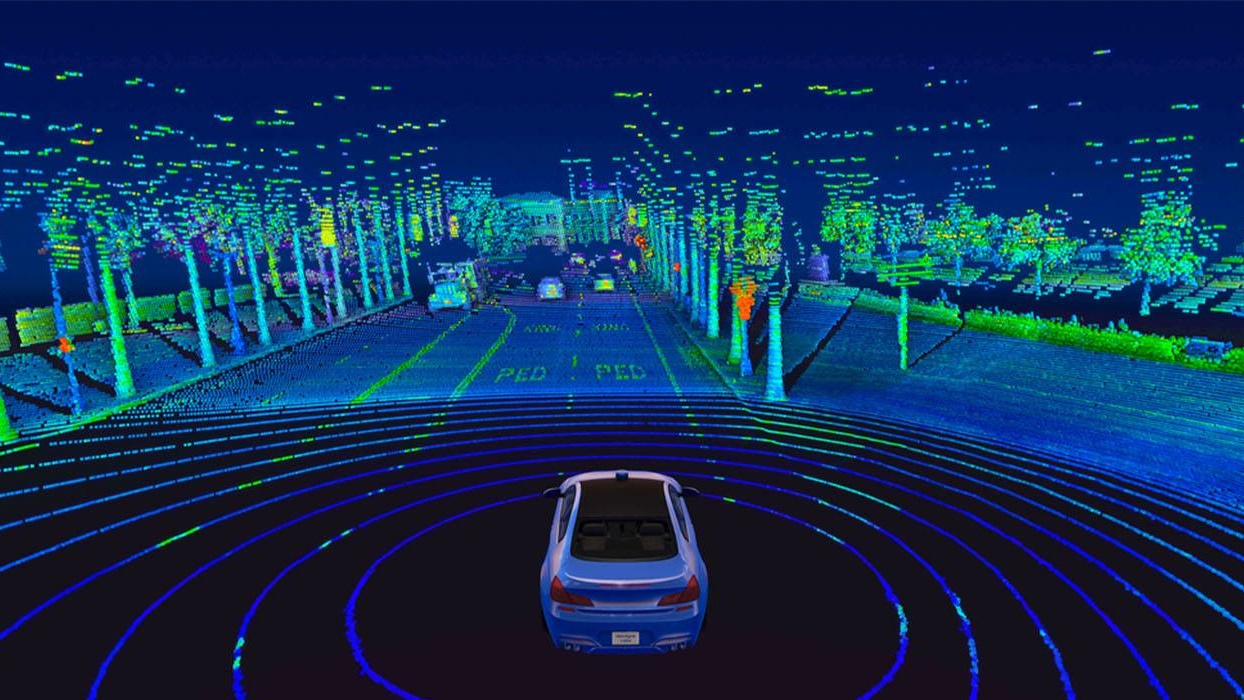
与真实的人学驾驶证需要视力体检一样,如何最大程度地感知环境,仍然是不少车企头痛的关键问题,尽管当下各种雷达和摄像头等已经在汽车上普及。
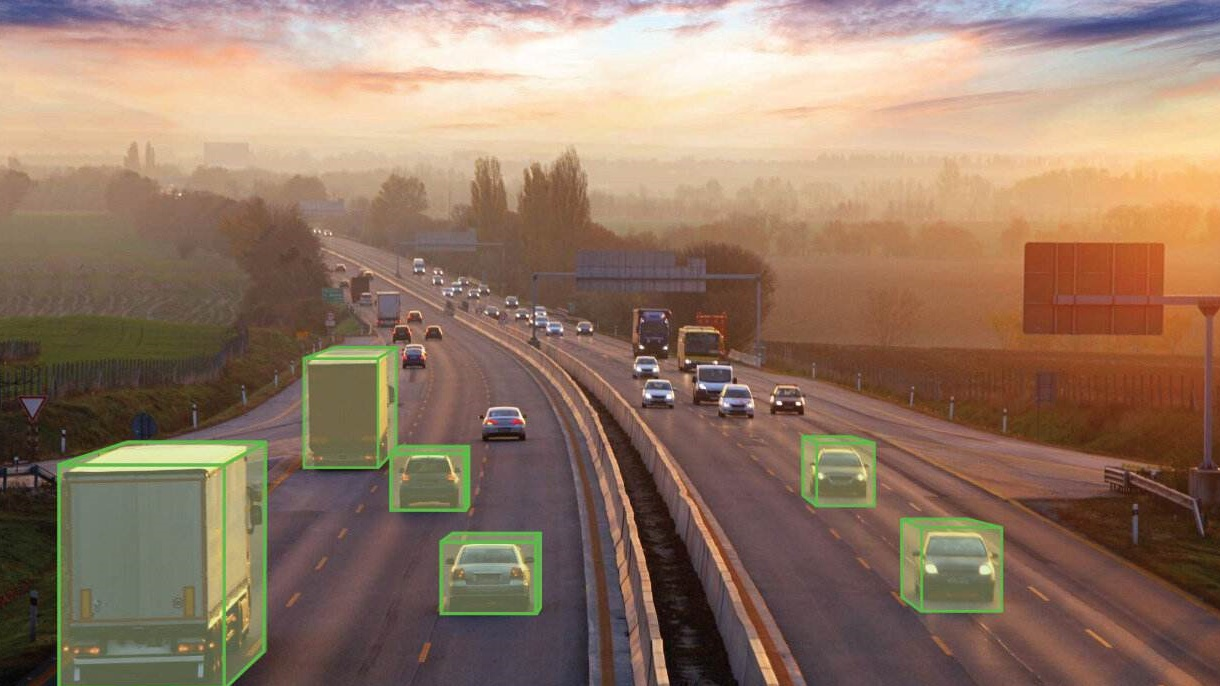
 这种感知并非简单地判断一些相当明显的环境,对全工况下的环境判断才是工程师们关注的重点。
这种感知并非简单地判断一些相当明显的环境,对全工况下的环境判断才是工程师们关注的重点。
比如,在大雨场景行驶中,以摄像头为主的视觉方案已经开始概率失效,毫米波雷达成了很好的补充。
又比如,在需要快速做出避障及紧急制动的场景下,激光雷达的优势又尽显,传感器的迭代,显然是进无止境的过程。
 其次,在接收到如雷达、摄像头、GPS、陀螺仪等多种传感器信息之后,丰富度是有了,但考虑到有着上限的处理器,如何融合一样是个不小的坎,毕竟直接无视某一传感器上报的信息显然太过不合理,对安全也是不小的挑战。
其次,在接收到如雷达、摄像头、GPS、陀螺仪等多种传感器信息之后,丰富度是有了,但考虑到有着上限的处理器,如何融合一样是个不小的坎,毕竟直接无视某一传感器上报的信息显然太过不合理,对安全也是不小的挑战。
 算法和平台,很关键
算法和平台,很关键
L5自动驾驶的第二点,就是算法。
这点不用过多解释。
在当前,汽车产品已经喊出了软件定义汽车的口号,在接收到关键信息之后如何保证安全和误报率的情况下做决断一样需要很多算法工程师“秃头”,一定程度上,这点也是当前算法工程师动辄百万年薪的因素之一。
 另外,算法完成之后,如何在处理器上让这些代码跑起来同样是OEM头痛的重点。
另外,算法完成之后,如何在处理器上让这些代码跑起来同样是OEM头痛的重点。
无论是英伟达的计算平台,还是国内的地平线,算力一直是自动驾驶的瓶颈。
按键盘上“← →”键也能翻页
为您推荐
- 相关
- 新车
- 导购
- 评测
- 动态
相关车系

相关二手车
更多>>起亚K2 2017款 三厢 1.4L MT GLS
2017年02月上牌 | 7.00万公里现代 悦纳 2020款 1.4L 手动GLS炫酷版
2020年06月上牌 | 4.30万公里现代 瑞纳 2016款 1.4L 自动智能型GLS
2016年06月上牌 | 3.80万公里起亚K3 2016款 1.6L 手动GLS
2017年03月上牌 | 7.20万公里东南A5翼舞 2022款 1.5L CVT翼钻型
2023年04月上牌 | 3.00万公里
热门精选
更多>>相关车系